




Piattaforma di carica automatica persunalizata per barili d'oliu lubrificante
Attributi di u produttu
| Forma di materiale di imballaggio: seau quadratu PE |
| Marca: Sunrise Intelligent Equipment |
| Personalizatu: Iè |
| Paquet di trasportu: Casu di legnu |
| Applicazione: barili d'oliu lubrificante |
Etichetta di u produttu
Sistema persunalizatu, barili d'oliu lubrificante, sistema di classificazione è alimentazione, piattaforma automatica, macchina di riempimentu, macchina di imballaggio, macchina di imballaggio, linea di produzione di oliu lubrificante, macchina persunalizata, macchina di scramble, oliu lubrificante.
Dettagli di u produttu
Introduzione di l'equipaggiu
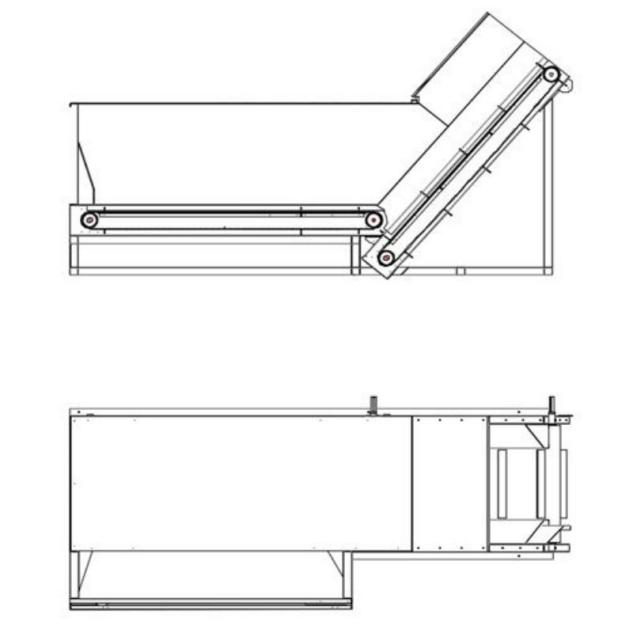
1. Dispositiu di cinturione di elevazione di secchi:
U trasportatore di cinturione in dui fasi eleva i barili d'oliu à una certa altezza è u manda à u trasportatore di manipolazione di buttiglia differenziale.L'altezza di u baffle cinturione hè menu di a mità di u gruixu di i barili di l'oliu, chì hè favurèvule à l'elevazione di i barili d'oliu di una sola capa è u rollu naturali di a pila di barili d'oliu.

2. Manipulazione di buttiglia differenziale:
A velocità differenziale di trasportu multi-sezione hè aduttatu per rializà a finitura è u trasportu di u barile d'oliu lubrificante.A larghezza di trasportu di l'ingressu di a parte di trasportu di u canna permette à dui barili di passà à u stessu tempu, chì reduce u risicu di estrusione mutuale di u canna è migliurà a stabilità di u funziunamentu di l'equipaggiu.Conveyor multi-stadiu, cuntrollu di ligame passu per passu per aghjustà a spaziatura di u canna.

3. Sistema di rilevazione di pusizioni visuale:
Installatu in a sezione di ingressu di u trasportatore.U sistema di pusizziunamentu visuale pigliarà foto per localizà è detectà u statu di forma di i barili d'oliu consegnati, furmà l'infurmazioni di dati è mandà à u sistema di robot dopu l'analisi.U numeru, a pusizione è l'orientazione di i barili d'oliu passati da u latu di l'ispezione seranu mandati à u controller, è u controller mandarà cumandamenti di afferramentu currispundenti à i dui robots di mani spider secondu i signali ricevuti.
4. Robot manipolazione di buttiglia spider hand:
Sicondu l'infurmazioni di i barili d'oliu mandati da u sistema di rilevazione visuale, a pusizione di afferramentu serà automaticamente adattata per afferrarà i barili d'oliu, è i barili d'oliu seranu invertiti sottu l'azzione di u quintu assi, è i barili d'oliu seranu dritti. è a manu fissata versu u trasportatore.I dui robot spider assignaranu automaticamente i travaglii di afferramentu secondu u numeru è a velocità di i barili d'oliu consegnati.
5. Dispositivu di ripresa:
A so funzione principale hè di cullà i barili d'oliu cù grabs invalidi è impediscenu l'accumulazione è i danni di i barili d'oliu cù grabs invalidi in circustanze spiciali.
6. U dispusitivu di trasportu di canna face a cunnessione è a transizione trà u cinturione trasportatore di ogni seccione è u cinturione trasportatore di a macchina di riempimentu bè, senza u fenomenu di chjappà a canna, stringhjendu a canna è inverte u canna.

